Tutorial 1: Evolution of a Population of Hard Spheres
In this tutorial we will consider a population of hard spheres which are homogenous in space. These spheres only interact via perfectly elastic collisions (a binary interaction), the cross section for which is given in Implemented Collisions.
INFO
The full code for this tutorial is split into two files, which can be found in src/examples/Hard Spheres/HardSphereCollisionMatrix.jl and src/examples/Hard Spheres/HardSphereTransport.jl. They can be run inside a Julia REPL using
juila> include("HardSphereCollisionMatrix.jl")
juila> include("HardSphereTransport.jl")Building the Gain and Loss Collision Matrices
Before any time evolution can be simulated, the collision matrices for the interactions between hard spheres need to be generated using the functions contained within the DiplodocusCollisions package.
First thing is to select the names of the four particles involved in the binary interaction string to identify it. These unique identifiers are then used internally to define the properties of the particles (please refer to Particles, Grids and Units for more details). In binary interactions, we follow the convention that the pairs of names (12) and (34) should be in alphabetical order. Therefore for the interaction between hard spheres the names are declared by:
using Diplodocus
name1 = "Sph";
name2 = "Sph";
name3 = "Sph";
name4 = "Sph";Next is to define how momentum space is to be discretised for each of particle species. Given that spheres are the only species here, we only need to define the discretisation for them, this includes the upper and lower bounds of momentum magnitude p_low_name, p_low_name, p_grid_name, p_num_name, u_grid_name, u_num_name, h_grid_name and h_num_name where name is the abbreviated three letter name of the particle species.
For this tutorial we will select the momenta
p_low_Sph = -5.0
p_up_Sph = 4.0
p_grid_Sph = "l"
p_num_Sph = 72
u_grid_Sph = "u"
u_num_Sph = 8
h_grid_Sph = "u"
h_num_Sph = 1Now we need to define how many times these bins are sampled by the Monte-Carlo integration process. This is defined by three values: numLoss defines the number of incoming states (i.e. sets of numGain defines the number of outgoing states (i.e. numThreads defines the number of threads to use (see the documentation for multi-threading in Julia).
TIP
numLoss and numGain should be larger than the number of bins associated with the incoming and outgoing states for good Monte-Carlo sampling.
numLoss = 16*p1_num*u1_num*h1_num*p2_num*u2_num*h2_num
numGain = 16*p3_num*u3_num*h3_num
numThreads = 10Further, for potentially improved integration accuracy, the Monte-Carlo sampling of outgoing states may be weighted by a scale factor. You as the user can set this scale factor as a range a:b:c where a is its minimum value, b is the step size and c its maximum value (a multiple of b)
scale = 0.0:0.1:1.0TIP
For the first round of integration it is advised to run with a scale of zero i.e. scale = 0.0:0.1:0.0 as weighting may not be needed for accurate integration. If inaccuracy is found, the scale should be increased gradually.
Then we need to define the fileLocation where the collision matrices are going to be saved to, here we assume that there exists a folder named "Data" located in the current working directory. With this we can also generate the integration Setup and fileName using the function UserBinaryParameters
fileLocation = pwd()*"\\Data"
(Setup,fileName) = UserBinaryParameters()Finally, we can run the integration using the function BinaryInteractionIntegration.
BinaryInteractionIntegration(Setup)TIP
Even on a good system, integration typically takes several hours if not days. But once it's done the matrices can be used over and over again. So don't worry, and while you wait perhaps sit back, relax and read that book that's been on your shelf for years just waiting to be read.
Checking the Gain and Loss Matrices
The evaluation of the collision matrices relies on Monte-Carlo sampling, therefore accuracy isn't guaranteed. There are several functions within Diplodocus to assist with determining if the integration accuracy is sufficient for use.
The most visual of these is the plotting function InteractiveBinaryGainLossPlot from DiplodocusPlots. This generates an interactive plot in which the user can vary the incoming and outgoing states, viewing the resulting outgoing spectra in momentum. To use this function, first load the file containing the collision matrices using BinaryFileLoad_Matrix:
Output = BinaryFileLoad_Matrix(fileLocation,fileName);
InteractiveBinaryGainLossPlot(Output)This will display the plot in a separate window in which you can interact with it.
As an example of poor integration, the plots below show a noisy spectra most likely due to insufficient sampling of incoming and outgoing states:
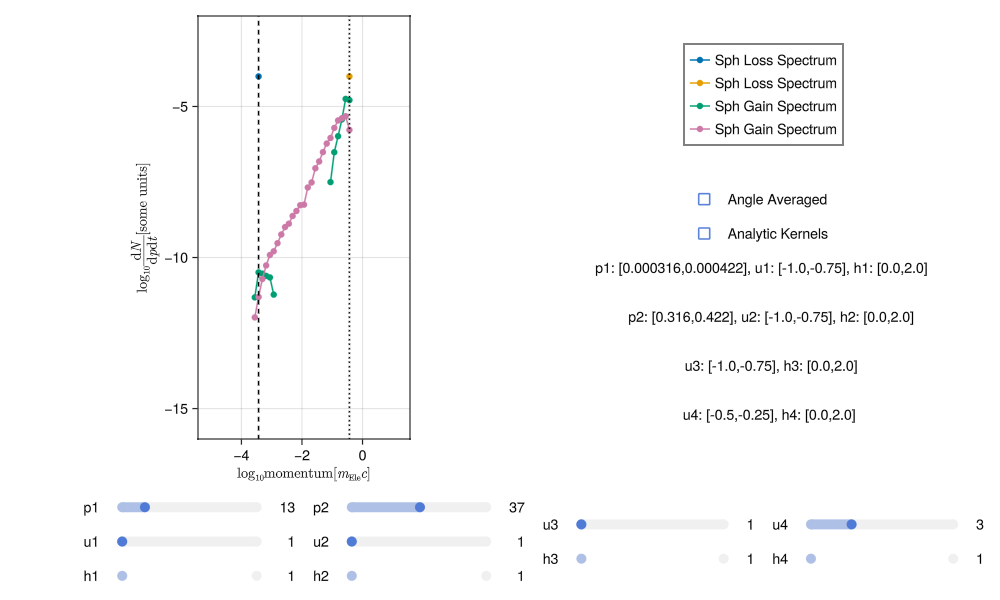
This noise can be reduced by increasing the number of sampling points (i.e. running the integration again with more numLoss and numGain). With sufficient sampling the spectra should have much less noise, something like this:
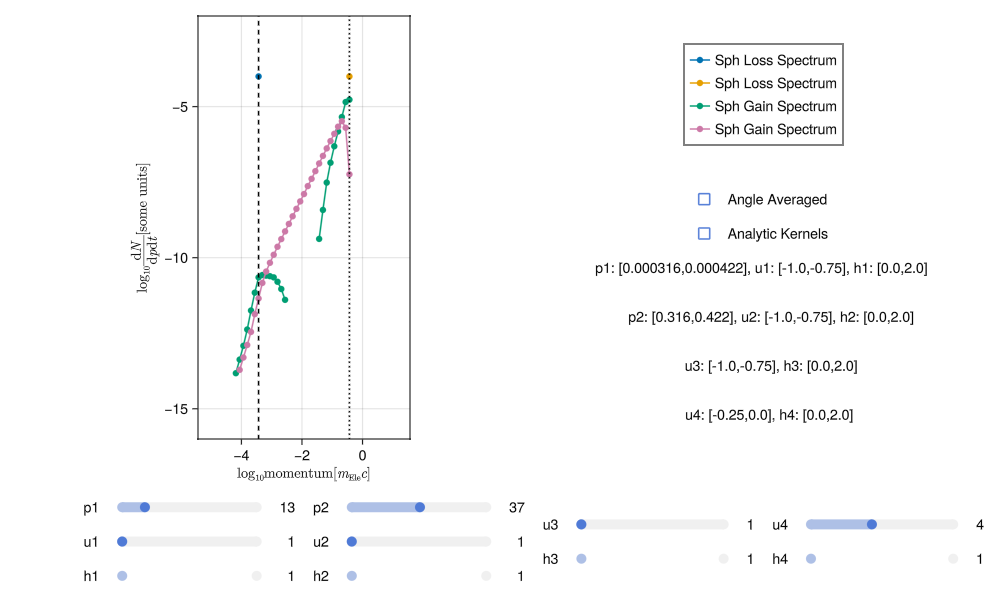
Generating good spectra involves a bit of trial and error. It is very easy to tell when a spectra is poor but it may take some practice to get used to how increasing the sampling and adjusting the scale effect the results.
Another way to judge the accuracy of integration is through the DoesConserve function. This prints to the terminal a series of statistics about the integration. For the "good" integration this looks like:
DoesConserve(Output)
sumGainN3 = 31738.51281689529
sumGainN4 = 0.0
sumLossN1 = 35806.95116178375
sumLossN2 = 0.0
sumGainN = 31738.51281689529
sumLossN = 35806.95116178375
#
sumGainE3 = 9.168965153229928e7
sumGainE4 = 0.0
sumLossE1 = 1.1131688197004674e8
sumLossE2 = 0.0
sumGainE = 9.168965153229928e7
sumLossE = 1.1131688197004674e8
#
errN = -4068.4383448884582
errE = -1.9627230437747464e7
ratioN = 0.8863785322993194
ratioE = 0.8236814570225856
#
mean error in N = 0.04753912150301698
std of error in N = 0.13225090463470893
#
mean error in E = 0.10008773513522755
std of error in E = 0.26088913569580185It includes, the total gain and loss of particles as well as the total gain and loss of energy (note as all particles are identical the gain and loss of particles 2 and 4 are neglected as they are identical to 1 and 3). In a perfect integration the total gain and loss of particles and energy would be equal in a binary interaction, but that is not quite possible in Diplodocus as outgoing states that are higher or lower in momenta than the momentum grid bounds are neglected. Nevertheless, the ratio of particles and energy in and out ratioN and ratioE respectively should be around 1.0 for good integration. These values give a sense of overall convergence but also provided are statistics for individual incoming to outgoing states. For a single incoming state (one set of mean error in N then gives the mean of that error and std of error in N gives the standard deviation. In the case here the mean error is around 5% with a standard deviation of around 10%. That is not bad, but there are two ways to improve this: first is just to increase the sampling by re-running the integration, the second is to scale the outgoing spectra by the ratio of particles lost to gained. The latter method guarantees convergence, but if the spectral shape is noisy may lead to incorrect particle evolution. This method is automatically applied as one of the last steps of integration and is stored as a separate set of matrices in the output. To access them use the corrected keyword when loading the file:
Output = BinaryFileLoad_Matrix(fileLocation,fileName,corrected=true);
DoesConserve(Output)
sumGainN3 = 35806.9511600794
sumGainN4 = 0.0
sumLossN1 = 35806.95116178375
sumLossN2 = 0.0
sumGainN = 35806.9511600794
sumLossN = 35806.95116178375
#
sumGainE3 = 1.038741922711484e8
sumGainE4 = 0.0
sumLossE1 = 1.1131688197004674e8
sumLossE2 = 0.0
sumGainE = 1.038741922711484e8
sumLossE = 1.1131688197004674e8
#
errN = -1.7043494153767824e-6
errE = -7.442689698898345e6
ratioN = 0.9999999999524017
ratioE = 0.9331396139814532
#
mean error in N = 1.5613294930823843e-16
std of error in N = 2.6004433237026757e-16
#
mean error in E = 0.09293018304286342
std of error in E = 0.2672640266499088Now the conversion statistics for particle number are accurate to machine precision.
Evolving the Spheres Through Phase Space
With a good set of interaction matrices, the evolution of a population of hard spheres can be evaluated using the functions contained within the DiplodocusTransport package.
For this tutorial we will consider the spheres to be initially distributed with momenta
Phase Space Setup
Let's now see how to set this up. First we need to set up the domains of space and time, these grids follow the same pattern as the momentum-space discretisation for the collision matrices:
using Diplodocus
t_up::Float64 = 3.0 # seconds * (σT*c)
t_low::Float64 = 0.0 # seconds * (σT*c)
t_num::Int64 = 15000
t_grid::String = "l"
time = DT.TimeStruct(t_up,t_low,t_num,t_grid)
space_coords = DT.Cylindrical() # x = r, y = phi, z = z
x_up::Float64 = 1.0
x_low::Float64 = 0f0
x_grid::String = "u"
x_num::Int64 = 1
y_up::Float64 = 2.0*pi
y_low::Float64 = 0.0
y_grid::String = "u"
y_num::Int64 = 1
z_up::Float64 = 1.0
z_low::Float64 = 0.0
z_grid::String = "u"
z_num::Int64 = 1
space = DT.SpaceStruct(space_coords,x_up,x_low,x_grid,x_num,y_up,y_low,y_grid,y_num,z_up,z_low,z_grid,z_num)This generates the Structs used internally to define the geometry of the system, note that as the system in this example is homogenous the number of spatial grid cells is set to 1 in each coordinate.
Next we need to define the particles in the system and their momentum-space grids
WARNING
Momentum-space grids must match those used in generating the collision matrices
name_list::Vector{String} = ["Sph",];
momentum_coords = DT.Spherical() # px = p, py = u, pz = phi
px_up_list::Vector{Float64} = [4.0,];
px_low_list::Vector{Float64} = [-5.0,];
px_grid_list::Vector{String} = ["l",];
px_num_list::Vector{Int64} = [72,];
py_up_list::Vector{Float64} = [1.0,];
py_low_list::Vector{Float64} = [-1.0,];
py_grid_list::Vector{String} = ["u",];
py_num_list::Vector{Int64} = [8,];
pz_up_list::Vector{Float64} = [2.0*pi,];
pz_low_list::Vector{Float64} = [0.0,];
pz_grid_list::Vector{String} = ["u",];
pz_num_list::Vector{Int64} = [1,];
momentum = DT.MomentumStruct(momentum_coords,px_up_list,px_low_list,px_grid_list,px_num_list,py_up_list,py_low_list,py_grid_list,py_num_list,pz_up_list,pz_low_list,pz_grid_list,pz_num_list,"upwind");Now we need to define all the binary interaction, emissive processes and forces acting within the system. For the case here, there is only binary interactions between the spheres:
Binary_list::Vector{BinaryStruct} = [BinaryStruct("Sph","Sph","Sph","Sph")];
Emi_list::Vector{EmiStruct} = [];
Forces::Vector{ForceType} = [];All of this system information is then collected within a single PhaseSpace struct for passing to the solver.
PhaseSpace = PhaseSpaceStruct(name_list,time,space,momentum,Binary_list,Emi_list,Forces);Building Interaction and Flux Matrices
As many interactions and forces may be present in a system, rather than dealing with a large number of matrices, Diplodocus combines all into three large 2D matrices. Two matrices are for the binary and emissive interactions and one for fluxes (including any forces and fluxes between spatial bins). The action of these matrices on the states of the system defines its evolution. This process is engaged using the BuildBigMatrices and BuildFluxMatrices functions (note the data directory containing the collision matrices must be specified):
DataDirectory = pwd()*"\\Data"
BigM = BuildBigMatrices(PhaseSpace,DataDirectory;loading_check=true);
FluxM = BuildFluxMatrices(PhaseSpace);TIP
BuildBigMatrices and BuildFluxMatrices, will indicate the size of these matrices in memory. Useful for determining if your system has sufficient memory to run the simulation.
Initial Conditions
First we need to initialise the state vector Initial that will house the initial conditions for all particles species at all positions in space (in this case there is only one particle species and one spatial position).
Initial = Initialise_Initial_Condition(PhaseSpace);To fill this state vector there are several functions which can be used to generate different types of initial conditions e.g. Inital_Constant!, Initial_PowerLaw!, Initial_MaxwellJuttner!, etc. For this case we want to use Initial_Constant! to modify Initial with a distribution that matches our selected initial conditions of:
Initial_Constant!(Initial,PhaseSpace,"Sph",pmin=10.0,pmax=13.0,umin=-0.25,umax=0.24,hmin=0.0,hmax=2.0,num_Init=1.0);WARNING
The way bin location are calculated rounds up, i.e. if a value is on a grid boundary then it is placed in the next bin.
Running the Solver
With all the grids, interactions and initial conditions defined the last thing to do before solving is pick the evolution scheme and deciding where and with what name the solution will be saved. There are only three schemes for time stepping to choose from within the Diplodocus framework, all held within the EulerStuct. The first (and only tested option) is the first order "upwind" (or explicit Euler) scheme, chosen by setting the last option in EulerStruct to false. The second is the first order "downwind" (or implicit Euler) scheme, chosen by setting the last option in EulerStruct to true. The third is second order leapfrog in time but this is unstable.
WARNING
Implicit time-stepping, is under-development and currently suffers from stability issues due to numerical precision.
Based on this, lets go with explicit time stepping, and store the file with a sensible name in the same location as the collision matrices:
scheme = EulerStruct(Initial,PhaseSpace,BigM,FluxM,false)
fileName = "HardSphere.jld2";
fileLocation = pwd()*"\\Data";Now lets evolve this system of particles!
sol = Solve(Initial,scheme;save_steps=10,progress=true,fileName=fileName,fileLocation=fileLocation);Plotting Results
First step is to load in the solution file
(PhaseSpace, sol) = SolutionFileLoad(fileLocation,fileName);The particle spectrum can then be plotted as a function of momentum and polar angle at three different times using:
MomentumAndPolarAngleDistributionPlot(sol,"Sph",PhaseSpace,Static(),(0.0,10.0,1000.0),order=1)where (0.0,10.0,1000.0) can either be the times in code units or the time steps, and order defines the exponent in the particle spectrum order=1 is default and corresponds to the number density of particles per bin as a function of momentum and polar angle. (order=2 is the energy density per bin as a function of momentum and polar angle). The resulting plot is:
!!! Missing Plot, does not want to load
This shows the "diffusion" of particles in both momentum and angle as a result of the binary interaction between spheres. Though it may be difficult to interpret the actual shape of the spectrum that is being formed from this 2D heatmap. To get an idea of this spectral shape, we can plot the angle-averaged distribution as a function of momentum:
MomentumDistributionPlot(sol,"Sph",PhaseSpace,Static(),step=15,thermal=true,order=1) With the flag
With the flag thermal=true the expected shape of a perfect Mawell-Juttner distribution is over-plotted for comparison. We can see that as time evolves the spheres approach the thermal distribution, but "over-shoot" at momenta away from the peak, this is linked to numerical diffusion due to the finite bin sizes.
Finally we can plot some statistics to see how well this evolution is converging towards being thermal and isotropic, as well as how well the system conserves particle number and energy density:
IsThermalAndIsotropicPlot(sol,PhaseSpace)
FracNumberDensityPlot(sol,PhaseSpace)
FracEnergyDensityPlot(sol,PhaseSpace)

 Here we can see the distribution exponentially approaching thermalisation and isotropisation, as expected. Further particle number density is conserved between time steps to numerical precisions, while energy density is constantly increasing but at a slow rate due to it not directly being conserved.
Here we can see the distribution exponentially approaching thermalisation and isotropisation, as expected. Further particle number density is conserved between time steps to numerical precisions, while energy density is constantly increasing but at a slow rate due to it not directly being conserved.
Animated Plotting
You may have noticed that the the momentum plots take Static() as an argument, this tells DiplodocusPlots.jl that you would like a generate a publication ready static vector plot. But there is an alternative, if instead you were to replace Static() with Animated(), rather than a static plot you would get a rendered .mp4 file of the time evolution. This can be done for both MomentumAndPolarAngleDistributionPlot and MomentumDistributionPlot individually or you can use the function MomentumComboAnimation to plot both at the same time.
MomentumComboAnimation(sol,["Sph"],PhaseSpace;plot_limits_momentum=(-0.2,1.9,-2.1,0.8),filename="HardSphereMomentumComboAnimation.mp4",thermal=true)The resulting animation can be seen at the top of this tutorial.